Availability: Product not in stock!

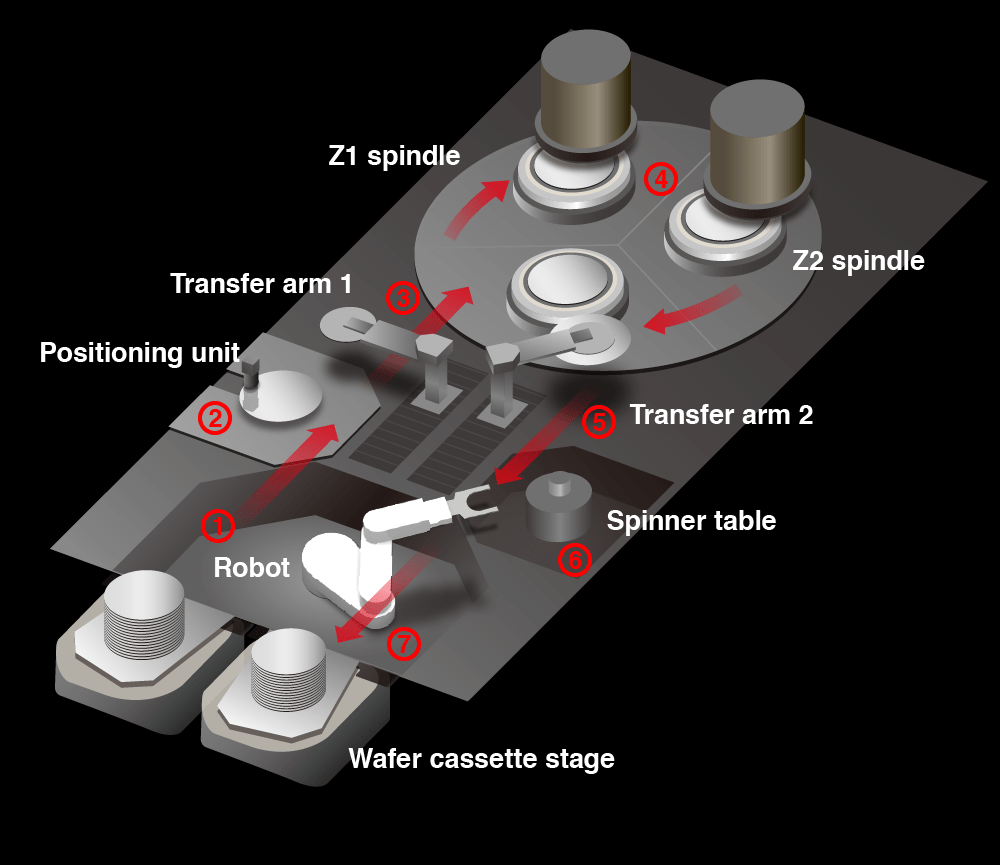
DFG8640 is a fully automatic grinder equipped with two spindles, three chuck tables, and one turntable. This equipment supports various workpieces up to Φ8 inches, including difficult-to-process materials such as Silicon, LT, LN, and SiC.
A spindle axis with high rigidity, low vibration, and less rotation speed fluctuation has been installed to achieve high-precision, high-quality processing. For the chuck table axis, an air bearing unit with high rigidity, low vibration, low heat expansion, and less rotation speed fluctuation has been installed.
The new GUI (graphical user interface), which enables intuitive operations such as tapping and swiping in the same manner as smartphones and tablet devices, offers quick operation from one screen to the target screen without going through other screens.

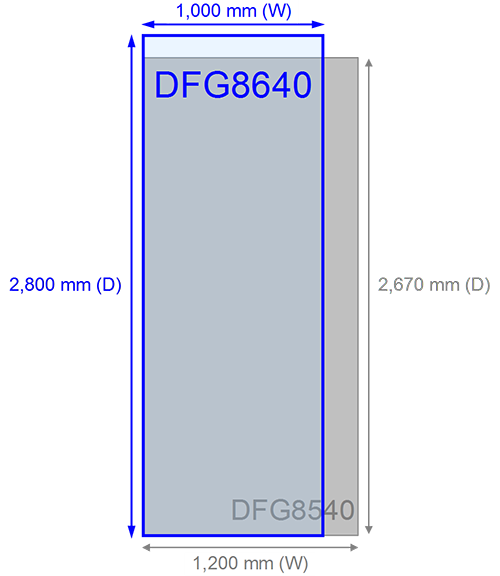
The footprint is approx. 13% smaller than DFG8540. In addition, more than 1.2 times as many wafers as DFG8540 can be transferred by reducing the cleaning mechanism operation time and redesigning the transferring arm.